Welcome to SeqIKPy!#
🪰 Overview#
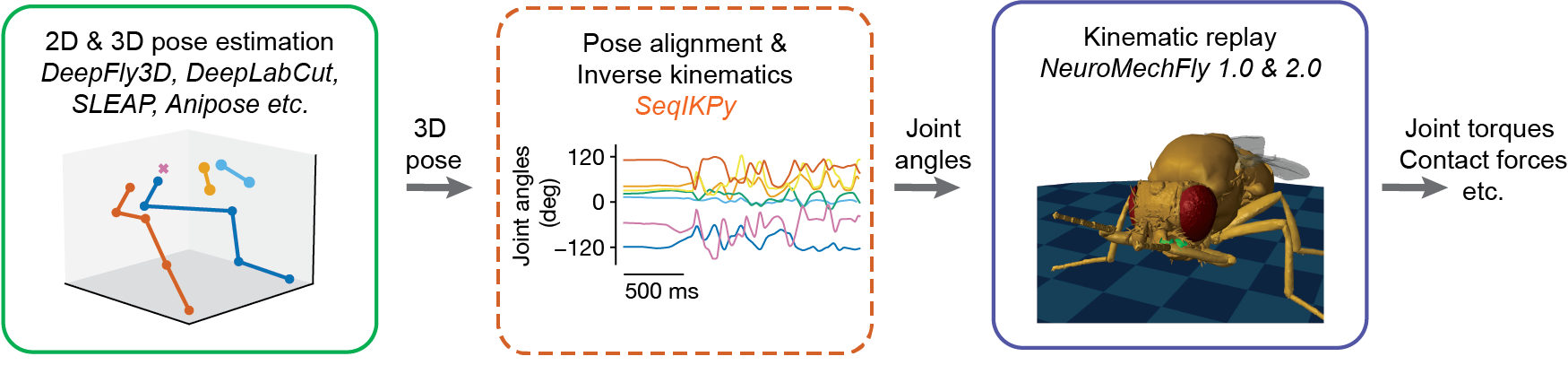
SeqIKPy is a Python package that provides an implementation of inverse kinematics (IK) that is based on the open-source Python package IKPy. In constrast to the current IK approaches that aims to match only the end-effector, SeqIKPy is designed to calculate the joint angles of the fly body parts to align the 3D pose of the entire kinematic chain to a desired 3D pose. In particular, you can use SeqIKPy in the pipeline shown below.
💻 Contributing#
We welcome contributions from the community. If you would like to contribute to the project, please refer to the contribution guidelines. Also, read our code of conduct. If you have any questions, please feel free to open an issue or contact the developers.
📖 License#
This project is licensed under the Apache 2.0 License.
🐞 Issues#
If you encounter any bugs or request a new feature, please open an issue in our issues page.
💬 Citing#
If you find this package useful in your research, please consider citing it using the following BibTeX entry:
@software{ozdil2024seqikpy,
author = {{\"O}zdil, Pembe Gizem and Wang-Chen, Sibo and Ning, Chuanfang and Ijspeert, Auke and Ramdya, Pavan},
title = {sequential-inverse-kinematics: v1.0.0},
month = jun,
year = 2024,
publisher = {Zenodo},
version = {v1.0.0},
doi = {10.5281/zenodo.12601316},
url = {https://doi.org/10.5281/zenodo.12601316}
}