Extending SeqIKPy for mouse forelimb kinematics#
What this example does:#
Models a single arm with 4 effective DOFs (shoulder yaw, shoulder pitch, shoulder roll, elbow pitch).
Runs two sequential IK stages: first recover shoulder yaw & pitch using the elbow trajectory, then recover shoulder roll & elbow pitch using the wrist trajectory while holding yaw/pitch fixed.
Plots joint angles and compares reconstructed forward kinematics with original marker data.
from dataclasses import dataclass
from typing import Optional, Dict, Tuple
from pathlib import Path
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from tqdm import trange
from ikpy.chain import Chain
from ikpy.link import OriginLink, URDFLink
from seqikpy.leg_inverse_kinematics import LegInvKinBase
from seqikpy.visualization import plot_3d_points, animate_3d_points
# Simple axes helpers
X_AXIS = [1.0, 0.0, 0.0]
Y_AXIS = [0.0, 1.0, 0.0]
Z_AXIS = [0.0, 0.0, 1.0]
plt.style.use('dark_background')
Mouse arm helper dataclass and the sequential IK solver#
Below we include the MouseArmSegmentLengths dataclass and the MouseArmIKSeq class. The first stores segment lengths for the mouse arm model, while the second implements the sequential IK solver for the mouse arm.
Note
Note that instead of creating a template for the body model, we obtain the morphological data from the kinematics itself.
Stage 1:#
Calculate shoulder yaw & pitch using elbow trajectory.
Stage 2:#
Calculate shoulder roll and elbow pitch DOFs using wrist trajectory while shoulder yaw/pitch values are set from Stage 1.
@dataclass
class MouseArmSegmentLengths:
upper_arm: float # shoulder -> elbow
forearm: float # elbow -> wrist
class MouseArmIKSeq(LegInvKinBase):
"""
Sequential inverse kinematics for a single mouse arm.
Stages:
- Stage 1: shoulder yaw + pitch (2 DOF), using the elbow as end-effector.
- Stage 2: shoulder roll + elbow pitch (2 DOF), using the wrist as end-effector
while keeping yaw & pitch fixed from Stage 1.
"""
def __init__(
self,
arm_markers: np.ndarray,
segment_lengths: Optional[MouseArmSegmentLengths] = None,
) -> None:
if (
arm_markers.ndim != 3
or arm_markers.shape[2] != 3
):
raise ValueError(
"arm_markers must have shape (n_frames, 3, 3): "
"[shoulder, elbow, wrist] x [x,y,z]"
)
self.arm_markers = arm_markers
self.n_frames = arm_markers.shape[0]
if segment_lengths is None:
self.segment_lengths = self._estimate_segment_lengths(arm_markers)
else:
self.segment_lengths = segment_lengths
self.joint_angles_dict: Dict[str, np.ndarray] = {}
self.forward_kinematics: Dict[str, np.ndarray] = {}
@staticmethod
def _estimate_segment_lengths(arm_markers: np.ndarray) -> MouseArmSegmentLengths:
"""Estimate segment lengths (upper arm, forearm) as median distances."""
shoulder = arm_markers[:, 0, :]
elbow = arm_markers[:, 1, :]
wrist = arm_markers[:, 2, :]
upper_arm_lengths = np.linalg.norm(elbow - shoulder, axis=1)
forearm_lengths = np.linalg.norm(wrist - elbow, axis=1)
upper_arm = np.median(upper_arm_lengths)
forearm = np.median(forearm_lengths)
return MouseArmSegmentLengths(
upper_arm=float(upper_arm),
forearm=float(forearm),
)
@staticmethod
def _compute_fk_positions(chain: Chain, joint_angles: np.ndarray) -> np.ndarray:
"""Compute forward kinematics positions for all links."""
fk = chain.forward_kinematics(joint_angles, full_kinematics=True)
positions = np.zeros((len(chain.links), 3))
for i, T in enumerate(fk):
positions[i, :] = T[:3, 3]
return positions
def calculate_ik_stage(
self,
end_effector_pos: np.ndarray,
origin: np.ndarray,
initial_angles: np.ndarray,
segment_name: str,
**kwargs,
) -> np.ndarray:
"""Calculate a single sequential IK stage for the mouse arm."""
stage = kwargs.get("stage", 1)
hide_progress_bar = kwargs.get("hide_progress_bar", False)
if stage not in (1, 2):
raise ValueError("MouseArmIKSeq supports only stage=1 or stage=2")
frames_no = end_effector_pos.shape[0]
end_effector_pos_diff = end_effector_pos - origin
if origin.size == 3:
origin = np.tile(origin, (frames_no, 1))
if stage == 1:
# Stage 1: shoulder yaw & pitch from elbow trajectory
chain1 = self._create_chain_stage1()
n_links1 = len(chain1.links)
joint_angles = np.zeros((frames_no, n_links1))
init = (
np.zeros(n_links1)
if initial_angles is None
else np.asarray(initial_angles)
)
for t in trange(
frames_no, disable=hide_progress_bar, desc=f"{segment_name} stage 1"
):
init = joint_angles[t - 1] if t > 0 else init
sol = chain1.inverse_kinematics(
target_position=end_effector_pos_diff[t],
initial_position=init,
)
joint_angles[t] = sol
shoulder_yaw = joint_angles[:, 1]
shoulder_pitch = joint_angles[:, 2]
elbow_recon = np.zeros((frames_no, 3))
for t in range(frames_no):
pos_links = self._compute_fk_positions(chain1, joint_angles[t])
elbow_recon[t] = pos_links[3] + origin[t]
self.joint_angles_dict[f"Angle_{segment_name}_Shoulder_yaw"] = shoulder_yaw
self.joint_angles_dict[
f"Angle_{segment_name}_Shoulder_pitch"
] = shoulder_pitch
wrist_placeholder = np.zeros_like(elbow_recon)
forward_kin = np.stack([origin, elbow_recon, wrist_placeholder], axis=1)
return forward_kin
# stage == 2: shoulder roll & elbow pitch from wrist trajectory
yaw_key = f"Angle_{segment_name}_Shoulder_yaw"
pitch_key = f"Angle_{segment_name}_Shoulder_pitch"
if (
yaw_key not in self.joint_angles_dict
or pitch_key not in self.joint_angles_dict
):
raise RuntimeError(
"Stage 2 requires stage 1 results (yaw/pitch) to be available"
)
shoulder_yaw = self.joint_angles_dict[yaw_key]
shoulder_pitch = self.joint_angles_dict[pitch_key]
chain2_dof = 6
joint_angles2 = np.zeros((frames_no, chain2_dof))
init2 = (
np.zeros(chain2_dof)
if initial_angles is None
else np.asarray(initial_angles)
)
elbow_recon_stage2 = np.zeros((frames_no, 3))
wrist_recon = np.zeros((frames_no, 3))
for t in trange(
frames_no, disable=hide_progress_bar, desc=f"{segment_name} stage 2"
):
chain2 = self._create_chain_stage2(
yaw=shoulder_yaw[t], pitch=shoulder_pitch[t]
)
init2 = joint_angles2[t - 1] if t > 0 else init2
sol = chain2.inverse_kinematics(
target_position=end_effector_pos_diff[t], initial_position=init2
)
joint_angles2[t] = sol
pos_links = self._compute_fk_positions(chain2, joint_angles2[t])
elbow_recon_stage2[t] = pos_links[4] + origin[t]
wrist_recon[t] = pos_links[5] + origin[t]
shoulder_roll = joint_angles2[:, 3]
elbow_pitch = joint_angles2[:, 4]
self.joint_angles_dict[f"Angle_{segment_name}_Shoulder_roll"] = shoulder_roll
self.joint_angles_dict[f"Angle_{segment_name}_Elbow_pitch"] = elbow_pitch
forward_kin = np.stack([origin, elbow_recon_stage2, wrist_recon], axis=1)
return forward_kin
def _create_chain_stage1(self) -> Chain:
"""Stage 1 chain: shoulder yaw/pitch, elbow dummy."""
L_upper = self.segment_lengths.upper_arm
links = [
OriginLink(),
URDFLink(
name="L_Shoulder_yaw",
origin_translation=[0.0, 0.0, 0.0],
origin_orientation=[0.0, 0.0, 0.0],
rotation=X_AXIS,
joint_type="revolute",
bounds=[-np.pi, np.pi],
),
URDFLink(
name="L_Shoulder_pitch",
origin_translation=[0.0, 0.0, 0.0],
origin_orientation=[0.0, 0.0, 0.0],
rotation=Y_AXIS,
joint_type="revolute",
bounds=[-np.pi / 2, np.pi / 2],
),
URDFLink(
name="L_Elbow_dummy",
origin_translation=[0.0, 0.0, -L_upper],
origin_orientation=[0.0, 0.0, 0.0],
rotation=None,
joint_type="fixed",
),
]
return Chain(name="mouse_arm_stage_1", links=links)
def _create_chain_stage2(self, yaw: float, pitch: float) -> Chain:
"""Stage 2 chain: fixed yaw/pitch, shoulder roll, elbow pitch, wrist dummy."""
L_upper = self.segment_lengths.upper_arm
L_fore = self.segment_lengths.forearm
links = [
OriginLink(),
URDFLink(
name="L_Shoulder_yaw",
origin_translation=[0.0, 0.0, 0.0],
origin_orientation=[yaw, 0.0, 0.0],
rotation=None,
joint_type="fixed",
),
URDFLink(
name="L_Shoulder_pitch",
origin_translation=[0.0, 0.0, 0.0],
origin_orientation=[0.0, pitch, 0.0],
rotation=None,
joint_type="fixed",
),
URDFLink(
name="L_Shoulder_roll",
origin_translation=[0.0, 0.0, 0.0],
origin_orientation=[0.0, 0.0, 0.0],
rotation=Z_AXIS,
joint_type="revolute",
bounds=[-np.pi / 2, np.pi / 2],
),
URDFLink(
name="L_Elbow_pitch",
origin_translation=[0.0, 0.0, -L_upper],
origin_orientation=[0.0, 0.0, 0.0],
rotation=Y_AXIS,
joint_type="revolute",
bounds=[-np.pi, 0.0],
),
URDFLink(
name="L_Wrist_dummy",
origin_translation=[0.0, 0.0, -L_fore],
origin_orientation=[0.0, 0.0, 0.0],
rotation=None,
joint_type="fixed",
),
]
return Chain(name="L_mouse_arm_stage_2", links=links)
def run_ik_and_fk(
self,
hide_progress_bar: bool = False,
initial_angles1: Optional[np.ndarray] = None,
initial_angles2: Optional[np.ndarray] = None,
) -> Tuple[Dict[str, np.ndarray], Dict[str, np.ndarray]]:
"""
Run both stages of IK and compute forward kinematics.
"""
shoulder = self.arm_markers[:, 0, :]
elbow = self.arm_markers[:, 1, :]
wrist = self.arm_markers[:, 2, :]
fk_stage1 = self.calculate_ik_stage(
end_effector_pos=elbow,
origin=shoulder,
initial_angles=initial_angles1,
segment_name="L_arm",
stage=1,
hide_progress_bar=hide_progress_bar,
)
fk_stage2 = self.calculate_ik_stage(
end_effector_pos=wrist,
origin=shoulder,
initial_angles=initial_angles2,
segment_name="L_arm",
stage=2,
hide_progress_bar=hide_progress_bar,
)
self.joint_angles = {
"L_Shoulder_yaw": self.joint_angles_dict.get("Angle_L_arm_Shoulder_yaw"),
"L_Shoulder_pitch": self.joint_angles_dict.get(
"Angle_L_arm_Shoulder_pitch"
),
"L_Shoulder_roll": self.joint_angles_dict.get("Angle_L_arm_Shoulder_roll"),
"L_Elbow_pitch": self.joint_angles_dict.get("Angle_L_arm_Elbow_pitch"),
}
self.forward_kinematics = {
"L_shoulder": shoulder.copy(),
"L_elbow_stage1": fk_stage1[:, 1, :],
"L_elbow": fk_stage2[:, 1, :],
"L_wrist": fk_stage2[:, 2, :],
}
return self.joint_angles, self.forward_kinematics
Running the solver with the Gilmer 2024 dataset#
We now demonstrate how to use the MouseArmIKSeq class with the gilmer2024_mouse_reaching dataset. If you have your own 3D marker data, you can adapt the code below by replacing the data loading section with your own data.
The dataset are downloaded from: https://simtk.org/projects/mouse_arm2024
# Path used in the example script (adjust if you placed the data elsewhere)
data_path = Path('../data/gilmer2024_mouse_reaching') / 'mouse_forelimb_coords_gilmer2024_reachset2.pkl'
reaching_kin = pd.read_pickle(data_path)
n_frames = len(reaching_kin['L_shoulder_x'])
joints = ('shoulder', 'elbow', 'wrist')
kin_array = np.zeros((n_frames, 3, 3))
for i, joint in enumerate(joints):
kin_array[:, i, 0] = reaching_kin[f'L_{joint}_x']
kin_array[:, i, 1] = reaching_kin[f'L_{joint}_y']
kin_array[:, i, 2] = reaching_kin[f'L_{joint}_z']
print('Frames:', n_frames)
print('kin_array shape:', kin_array.shape)
Frames: 50
kin_array shape: (50, 3, 3)
Run sequential IK and visualize results#
We instantiate MouseArmIKSeq, run both stages, then plot joint angles and compare FK reconstructions against the original markers. Adjust initial_angles1/initial_angles2 if needed.
# Instantiate solver and run IK
ik_solver = MouseArmIKSeq(arm_markers=kin_array)
joint_angles, fk = ik_solver.run_ik_and_fk(
hide_progress_bar=False,
initial_angles1=[0, 0, 0, 0],
initial_angles2=[0, 0, 0, 0, -0.2, 0],
)
print('Available joint angle keys:', list(joint_angles.keys()))
L_arm stage 1: 100%|███████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 137.81it/s]
L_arm stage 2: 100%|████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████████| 50/50 [00:00<00:00, 56.93it/s]
Available joint angle keys: ['L_Shoulder_yaw', 'L_Shoulder_pitch', 'L_Shoulder_roll', 'L_Elbow_pitch']
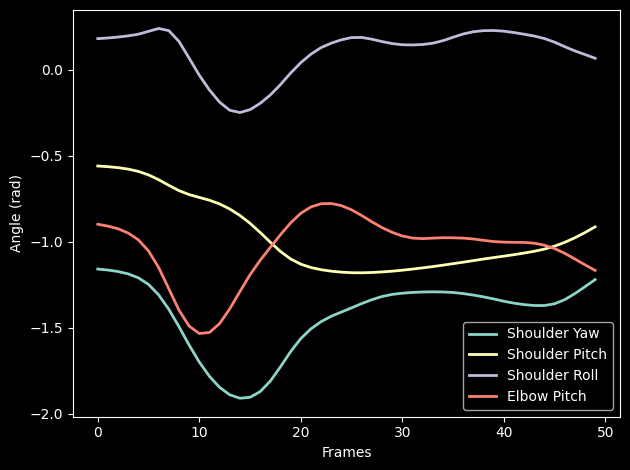
Plot joint angles#
# Plot joint angles
plt.figure()
for key, label in [
("L_Shoulder_yaw", "Shoulder Yaw"),
("L_Shoulder_pitch", "Shoulder Pitch"),
("L_Shoulder_roll", "Shoulder Roll"),
("L_Elbow_pitch", "Elbow Pitch"),
]:
plt.plot(joint_angles[key], label=label, lw=2)
plt.xlabel("Frames")
plt.ylabel("Angle (rad)")
plt.legend()
plt.tight_layout()
plt.show()
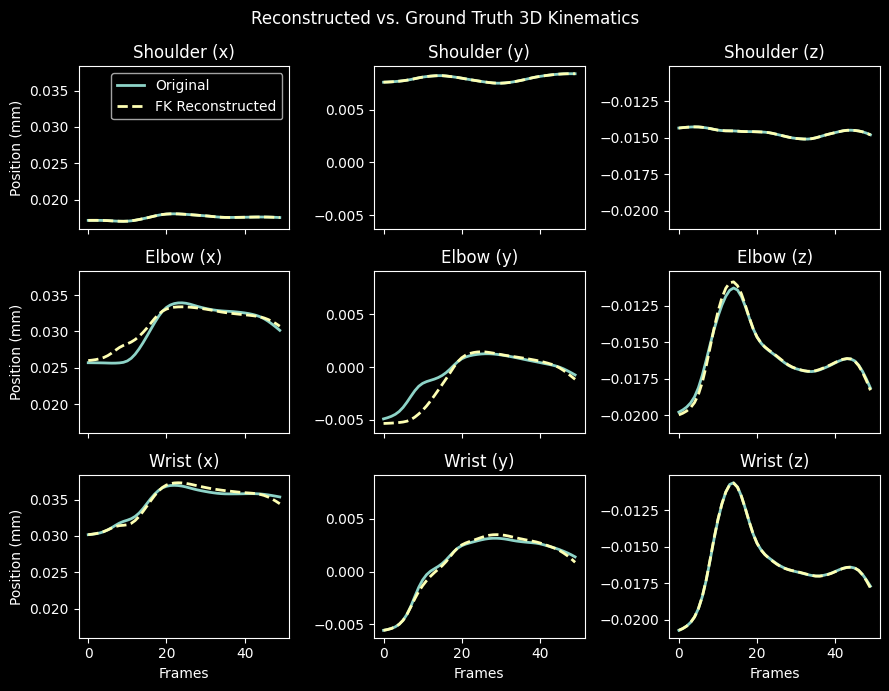
Plot reconstructed vs original markers in 3D#
fig, ax_arr = plt.subplots(3, 3, figsize=(9, 7), sharex=True, sharey="col")
coords = ("x", "y", "z")
for i, joint in enumerate(joints):
for j, coord in enumerate(coords):
ax = ax_arr[i, j]
ax.plot(
kin_array[:, i, j],
label="Original",
ls="-", lw=2,
)
ax.plot(
fk[f"L_{joint}"][:, j],
label="FK Reconstructed",
ls="--", lw=2,
)
ax.set_title(f"{joint.capitalize()} ({coord})")
if i == 0 and j == 0:
ax.legend()
if j == 0:
ax.set_ylabel("Position (mm)")
if i == 2:
ax.set_xlabel("Frames")
plt.suptitle("Reconstructed vs. Ground Truth 3D Kinematics")
plt.tight_layout()
plt.show()
Alternatively, you can visualize or animate the data using SeqIKPy’s built-in visualization tools.#
fk_array = np.zeros((n_frames, 3, 3))
fk_array[:, 0, :] = fk["L_shoulder"]
fk_array[:, 1, :] = fk["L_elbow"]
fk_array[:, 2, :] = fk["L_wrist"]
ground_truth = {"L_arm": kin_array}
fk_arm = {"L_arm": fk_array}
animate_3d_points(
points3d=ground_truth,
points3d_second=fk_arm,
export_path="mouse_fk_ik_elev_0_azim_0.mp4",
frame_no=50,
elev=0,
azim=0,
fps=100,
marker_types={"L_arm": "o"},
)
2025-12-12 18:21:46,956 - INFO- Making animation...
2025-12-12 18:21:49,022 - INFO- Animation is saved at mouse_fk_ik_elev_0_azim_0.mp4